A Comparative
Study of Forecasting Methods in the
Context of Digital Twins



1Escola
Politécnica de Pernambuco, Universidade de Pernambuco, Recife, Brasil. E-mail: jcsm@ecomp.poli.br
2Centro de Informática, Universidade
Federal de Pernambuco, Recife, Brasil.
DOI: 10.25286/repa.v9i1.2771
Esta obra apresenta Licença Creative Commons Atribuição-Não Comercial
4.0 Internacional.
Como citar este
artigo pela NBR 6023/2018: João Souto Maior; Byron Leite Dantas Bezerra; Luciano
Leal; Celso A. M. Lopes Junior; Cleber Zanchettin. A Comparative Study of
Forecasting Methods in the Context of Digital Twins. Revista de Engenharia e
Pesquisa Aplicada, v.9, n. 1, p. 28-40, 2024. DOI: 10.25286/repa.v9i1.2771
ABSTRACT
This paper
describes and compares different forecasting techniques used to build a
real-world Industry 4.0 application using concepts of Digital Twins. For this
experiment, real data collected from a temperature sensor during the initial
stages of a manufacturing process is used. This raw data from the sensors is
preprocessed using state-of-the-art time series techniques for gap removal,
normalization, and interpolation. The processed data are then used as input for
the selected forecasting techniques for training, forecasting, and tests.
Finally, the rates of the different techniques are compared using accuracy
measures to determine the most accurate technique to be used in the application
to support its forecasting use cases. This paper also explores different areas
that can be used as topics for future work.
KEY-WORDS:
Digital
Twins; Sensors; Time Series; Forecasting.
1 INTRODUCTION
The concept of digital
twins is indeed relatively new in its popularized form [1], but its underlying
principles have been applied in various industries for many years. Michael
Grieves is often credited with introducing the term digital twins in 2002 during
a conference in the context of product lifecycle management (PLM). However, it
is essential to note that the idea of creating digital representations of
physical objects or systems happened before this term was coined.
Historically, there has
been little consensus on the exact definition of digital twins, or the
terminology used to describe them. This lack of agreement stems from the
multidisciplinary nature of digital twins, which can be applied to various of
fields, from manufacturing to healthcare, and beyond [2], represented in Figure 1.
Figure 1 – Digital Twins applications

Source: [2]
In 2020, the Digital Twin
Consortium was established by member companies to address this problem [3]. The consortium primarily
focuses is on standardizing technology and terminology related to digital twins
to promote their wider adoption across industries. This effort reflects the
growing recognition of the potential benefits that digital twins can offer in
terms of improving product design, manufacturing processes, asset management,
and overall system performance.
Digital twins create
virtual representations of physical objects, systems, or processes to monitor,
simulate, and optimize their behavior and performance. These virtual
representations are continuously updated with real-time data, allowing for
better decision-making, predictive maintenance, and enhanced domain efficiency.
Within the scope of
Industry 4.0 and the amount of data provided by the Internet of Things (IoT),
it is possible to compute a digital replica of a physical asset. This so-called
Digital Twin replica ideally represents all the behaviors and functioning of
the physical twin. The high-fidelity Digital Twin model of physical assets can
produce system data close to physical reality, which offers extraordinary
opportunities for forecasting, simulation, and diagnosis of asset failures.
Moreover, in forecasting Digital Twins can be used to optimize the energy
consumption of assets, reducing operational costs and environmental impact.
They help in fine-tuning parameters for optimal performance while minimizing
energy usage.
In this context, this work
investigates different forecasting techniques used to build a real-world
Industry 4.0 application using concepts of Digital Twins, comparing such
methods with real data collected from a temperature sensor during the initial
stages of a manufacturing process. As described in Figure 2, sensor data is
collected from an industry and its data is consolidated into an IoT Hub to be
used as inputs for the different digital twin’s models that are generated from
the selected assets of the chosen industry. Finally, this data is presented to
the end users as dashboards, graphs, and reports informing them of the real and
predicted condition of the equipment.
Figure 2 – Digital Twins applications
diagram
Source: Author
The paper is organized as
follows. Section 2 outlines the related work on time series forecasting.
Section 3 discusses the materials and methods of this article with the results
of each selected forecasting method. Section 4 presents a comparison of the
results of the selected methods. Section 5 offers the study’s conclusion and list
different areas that can be used for future works.
2 BACKGROUND AND RELATED WORKS
2.1 TIME SERIES PREPROCESSING
Univariate time series
data, characterized by a sequence of observations recorded at successive time
points, find applications in diverse domains, including finance, healthcare, meteorology,
and industrial processes. Before employing advanced analysis and
forecasting methods, it is crucial to effectively preprocess the data to
enhance its quality, remove noise, and ensure reliable results [4], [5], [6].
Outliers, extreme values
that deviate significantly from the general trend of the data, can distort
statistical analyses and modeling efforts. Techniques such as z-score-based [7] methods can help identify
and remove these outliers, ensuring the accuracy of subsequent studies.
IoT-generated time series
data can exhibit outliers due to various factors including sensor malfunctions,
transient disturbances, or even cyber-attacks. Identifying these outliers is
crucial, as they can distort the temporal patterns important to accurate
predictions in IoT systems.
The mean absolute deviation
(MAD) which its formula is described in equation 1, emerges as a powerful
approach to detecting outliers within time series data [7]. Given IoT data’s dynamic
and evolution, the MAD method accounts for the absolute deviations of
individual data points from the median of the entire time series. This
adaptability is particularly valuable in IoT scenarios, where outliers might
emerge from previously unseen events or irregularities.
 (1)
(1)
The values identified as
outliers were removed from the time series and the gaps created after the
removal were filled using linear interpolation. Missing values are expected in
time series data and can arise for various reasons. Imputing missing values is
essential to ensure a continuous and complete time series for analysis. Linear
interpolation is widely used to estimate missing values based on neighboring observations
and is a widely used method [8].
Time series data often vary
in scale and magnitude, leading to biased analyses and misleading
interpretations. Normalization, whose formula is described in equation 2,
ensures that all features are brought to a standard scale, eliminating the
dominance of high-scale variables in analyses like clustering, classification,
and regression. In the formula, min and max values refer to the normalization
of the variable x, and y is the normalized value.
 (2)
(2)
It is essential to verify
the time series stationarity. The Augmented Dickey-Fuller (ADF) [9] test is a widely used
statistical test to determine if a time series is stationary [10], meaning that its
statistical attributes remain unchanged over the time.
Walk-forward
validation using a sliding window [11], represented in Figure 3 and known as
rolling validation or moving window validation, is a time series
cross-validation technique used to assess the performance of time series
forecasting models. Unlike traditional cross-validation, where data is randomly
shuffled, maintaining the temporal order of the data, which is crucial for time
series analysis, Walk-forward validation simulates the real-world scenario of
making sequential predictions as new data becomes available over time.
Figure 3 – Walk Forward validation with
a sliding window.
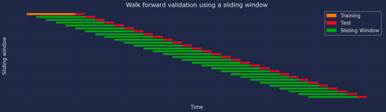
Source: Author.
Walk-forward validation
also considers the model to be fitted every time the window is moved forward
along the time series. Still, since the collected data from the sensor is a stationary
time-series, it is not necessary to re-fit the model. This represents less
computational requirements during the execution of tests and during the usage
of the model in real-time with new data from the sensors.
A primary advantage of this
method is that more data is used to train and test the model without having to
use a validation set and without the risk of overfitting [12].
2.2 FORECASTING METHODS
2.2.1 Baseline methods
As baseline methods, we
considered the Naïve and Naive Drift approaches. Both serve as reference points
for evaluating the performance of more complex forecasting models. These
methods provide simple and straightforward predictions that can be used to
benchmark the effectiveness of more sophisticated techniques.
The Naive method predicts
that the next value will be the same as the last observed value using the formula
described in eq. 3 It assumes that there is no change or trend in the data. The
equation uses the value for  using the previous value
using the previous value  of the time series.
of the time series.
 (3)
(3)
Naive Drift, or the Drift
method, is a basic forecasting technique that assumes a linear trend in the
time series data. It is an extension of the Naive method, which predicts that
the next value will be the same as the last observed value. The Naive Drift
method, however, considers the time elapsed between observations and adjusts
the prediction based on this elapsed time, effectively incorporating a linear
trend or drift into the forecast.
2.2.2 Statistical methods
Statistical forecasting uses
historical data and statistical techniques to predict time series values and other
data types.
The ARIMA (Auto Regressive
Integrated Moving Average) method was developed and introduced in the early
1970s [13]. The fundamental concepts behind ARIMA were established by
the statisticians George E. P. Box and Gwilym M. Jenkins, and their work is
documented in the book titled ”Time Series Analysis: Forecasting and Control”,
which was first published in 1970. This method is still being used for time
series forecasting due to its good results, including forecasting using
industrial sensor data [14] [15] [16]. Another advantage of this method is that
it when only has limited historical data from the sensors to use during the
training phase [17].
2.2.3 Machine Learning
Machine learning can be
used for univariate time series forecasting by leveraging patterns and
relationships within historical data to predict future values of a single
variable over time.
Recurrent Neural Networks
(RNNs) are artificial neural network architecture that handle sequence data,
such as time series. Unlike traditional neural networks that process each input
individually, RNNs have feedback connections, allowing previous information to
influence the processing of subsequent inputs. The critical feature of RNNs is
their ability to maintain an internal memory or hidden state, which is updated
with each new input and influences future processing. This memory enables RNNs
to capture long-term dependencies in data sequences, making them particularly
useful in situations when the previous context is relevant for understanding
the current context.
In the paper [18], Hochreiter and
Schmidhuber proposed the LSTM architecture to solve the vanishing gradient
problem that can occur in traditional recurrent neural networks (RNNs). The key
element that gives the capability to capture long-term dependencies to LSTM is
called memory block and described in Figure 4.
Figure 4 – LSTM diagram
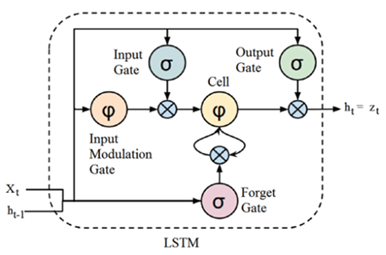
Source: [19].
Due to this memory block, LSTMs
can handle long-range dependencies and capture patterns in sequences over
extended time intervals, making them highly suitable for tasks involving
sequential data, such as time-series forecasting [19] [20] [21] [22].
2.4 HYPERPARAMETERS SEARCH
Hyperparameter search is
the process of finding the best set of hyperparameters for a machine learning
model [23]. Hyperparameters are parameters that control the learning
process of the model but are not learned from the data. Some common examples of
hyperparameters include the learning rate, the number of epochs, and the number
of hidden layers in a neural network.
2.5 FORECASTING ACCURACY
Forecasting accuracy refers
to the degree of closeness between the predicted values from a forecasting
model and the real data of the target variable. It measures how well a
forecasting model can accurately capture the underlying patterns, trends, and
variations in the data to make accurate predictions of future values.
The forecast accuracy
measures are always calculated using test data that were not used when
computing the forecasts [24]. When using forecasts that are on the
same scale, the root mean square error (RMSE) is one of the recommended methods
and it is defined using the formula in (4). In the equation n is the
number of observations,  is the real observed value
at time, and
is the real observed value
at time, and  is the predicted value at
time
is the predicted value at
time  .
.
 (4)
(4)
3 MATERIALS AND METHODS
This section provides a
comprehensive overview of the executed steps. It begins with data loading,
followed by preprocessing. Next, we delve into training using four distinct
methods. Finally, we present the results obtained from these methods.
3.1 DATA SET
The first step executed
during this study was to perform the data preprocessing required on the
collected data from the industrial sensors. The collected sensor data was saved
in a CSV file, including the timestamp and temperature attributes. The dataset
range starts from 00:00 of 1st of June of 2022, to 23:59 of June 29,
2022 with a total of 88,741 sensor readings. This represents an average of
3,060 readings per day.
The data from this CSV was
loaded as a time series and plotted using a Python data visualization library
called Matplotlib [26] to execute the first visual inspection and analysis. During
this first visual inspection of Figure 6, it was possible to see a similar
behavior of the time series along the collected period, indicating the time
series could be identified as stationary and requiring a stationarity test to
be executed [9].
3.2 PREPROCESSING
The subsequent step involved
identifying outliers using mean absolute deviation (MAD), eliminating them, and
then employing linear interpolation to fill the gaps left in the time series due
to these removals. This process detected and replaced 1,031 outliers in the
time series and can be visualized in Figure 7. The total length of the time
series was not affected because all removed outliers were replaced using linear
interpolation.
Another executed step was
to verify the time series stationarity to validate this hypothesis identified
in the visual inspection after plotting the time series. The Augmented
Dickey–Fuller (ADF) [9] test was executed and confirmed the collected sensor
data created a stationary time series. The ADF test returned a p-value equals
to 3.408511793361129e−29, and since this value is less than or equal to
0.05, H0 was rejected, and stationarity was confirmed.
The data set was then split
into training and test data sets. The division of 80/20 was used to split,
meaning the training data set was created with 80% of the values total and test
20%. Their sizes were 70,992 and 17,749 sensor readings. After this split, both
data sets were normalized as described in section 2.1 using the normalization
parameters obtained from the training data set. The result of this step can be
observed in Figure 8.
3.3 EXPERIMENTAL METHODOLOGY
The forecast range selected
in our experiments was from one step forward to ten steps. The forecasting used
walk-forward validation with a sliding window described in Figure 3. The
sliding window size was set according to the forecasting range for each
iteration of the test. This means the executed test was repeated 10 times with
different forecasting ranges, varying from 1 to 10.
The first baseline
forecasting method executed was the Naive forecast. The forecast horizon
selected for this method was from one step to ten steps forward. The forecast
was executed using the test data set for each different value of the forecast
horizon and always using the previous observed value to determine the
forecasted values. The accuracy of this method is presented in Table 1.
Table 1 – Naive Forecasting RMSE.
|
Forecast horizon
|
RMSE
|
|
1 step
|
0.020107
|
|
2 steps
|
0.028467
|
|
3 steps
|
0.035618
|
|
4 steps
|
0.040981
|
|
5 steps
|
0.047885
|
|
6 steps
|
0.053208
|
|
7 steps
|
0.054365
|
|
8 steps
|
0.059190
|
|
9 steps
|
0.064050
|
|
10 steps
|
0.069753
|
Source: Author.
The following executed
forecasting method was Naive Drift and the same forecasting horizons from the
previous method were also used in this one as well. For this method, different
subsets of the training data set were used to verify if smaller training
subsets can speed up the training phase without compromising the accuracy of
the forecasts. The training data sets were tested using the lengths described
in Table 2.
Table 2 – Training data set lengths
used for in models.
|
Training data set lengths
|
|
50
|
|
100
|
|
500
|
|
1000
|
|
10,000
|
|
20,000
|
|
50,000
|
|
70,000
|
Source: Author.
After some preliminary
experiments, the best accuracy with the lower RMSE was observed with 50,000
values from the training data set. Using the complete data set or more
significant amounts was unnecessary to achieve better accuracy for this
forecasting method. The result of this method was very similar when compared to
the previous method, Naive, even having much more data being used for the
training compared to Naive since it only uses the previous n readings. One of
the possible reasons for this is due to the high-frequency nature of the time
series used in this experiment, which helps in the first method. The RMSE for
this method is described in Table 3.
Table 3 – Naive Drift Forecasting lowest
RMSEs.
|
Forecast horizon
|
RMSE
|
|
1 step
|
0.020107
|
|
2 steps
|
0.028467
|
|
3 steps
|
0.035619
|
|
4 steps
|
0.040982
|
|
5 steps
|
0.047886
|
|
6 steps
|
0.053210
|
|
7 steps
|
0.054367
|
|
8 steps
|
0.059192
|
|
9 steps
|
0.064053
|
|
10 steps
|
0.069757
|
Source: Author.
Auto ARIMA was also
executed with the same data set and the same forecasting horizons as the
previous method. The length of the training data set was also tested using the
different values defined in Table 2, using the same approach as the Naive Drift
method that was previously executed. As was initially expected, this method
resulted in better accuracy than the baseline methods. Moreover, according to Table
7 some scenarios of multistep ahead required less training to obtain better
accuracy. The RMSE of this method is described in Table 4 and Table 7, the
latter includes the length of the training data set that resulted in the lowest
RMSE value. For this method, the StatsForecast [26] Python library was used.
Table 4 – Auto ARIMA Forecasting lowest
RMSEs.
|
Forecast Horizon
|
RMSE
|
|
1 step
|
0.018433
|
|
2 steps
|
0.026235
|
|
3 steps
|
0.033717
|
|
4 steps
|
0.039248
|
|
5 steps
|
0.043817
|
|
6 steps
|
0.051401
|
|
7 steps
|
0.052531
|
|
8 steps
|
0.055412
|
|
9 steps
|
0.064519
|
|
10 steps
|
0.066474
|
Source: Author.
After completing the tests
with the baselines and statistical methods, the same data set was executed
using a Long Short-Term Memory (LSTM) recurrent neural network [18]. This model was selected because
of its ability to capture long-range dependencies [18] and due to this it can effectively
handle sequential data such as time-series, which is the case in the dataset
being used in this study.
The first executed step was
the hyperparameters tuning. This was done using an open-source Python package
for hyperparameter optimization framework named Optuna [23] that allows to dynamically define
the hyperparameters search space to find its optimal values. The hyperparameters
search was executed using the following ranges.
·
Number
of layers: 1 - 100
·
Size of
hidden layer: 1 - 250
·
Dropout:
0.0 – 0.9
·
Epochs:
1 - 999
As a result of this search,
the following values were found and used in the LSTM model:
·
Number
of layers: 1
·
Size of
hidden layer: 11
·
Dropout:
0.12491736459588197
·
Epochs:
405
·
Learning
Rate: 1e-3
·
Optimizer
Class: Adam
The RMSE obtained by this
method can be visualized in Table 5.
Table 5 – LSTM Forecasting lowest RMSEs.
|
Forecasting Horizon
|
RMSE
|
|
1 step
|
0.016199
|
|
2 steps
|
0.020448
|
|
3 steps
|
0.025473
|
|
4 steps
|
0.028625
|
|
5 steps
|
0.031311
|
|
6 steps
|
0.035913
|
|
7 steps
|
0.036612
|
|
8 steps
|
0.038325
|
|
9 steps
|
0.044608
|
|
10 steps
|
0.044678
|
Source: Author.
4 RESULTS COMPARISON
The first step was to
verify with the Friedman test [28] if there is significant statistical
difference observed across the collected values or if they could have occurred
by chance. The test returned p-value rejecting the null hypothesis of the test,
meaning there are significant differences among the obtained RMSEs from each
method.
Then, a comparison between
the selected methods using the lowest RMSE values collected for each forecast
horizon regardless of the length of the training data set, which means that the
optimal size of the training data set was used in this first comparison. As presented
in Table 6, LSTM outperformed the other methods in all different forecasting
horizon scenarios. Auto ARIMA was the second on the list followed by Naive
Drift and Naïve, which obtained similar values for the RMSE. LSTM outperformed
Auto ARIMA by an average of 4.83%. Auto ARIMA outperformed Naive Drift and
Naive by an average of 21.30%.
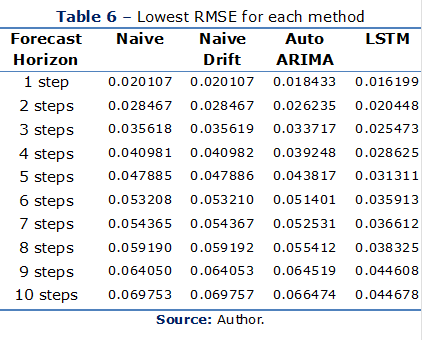
Figure 9 and 10 shows the
comparison among all selected methods to their forecasting time. The first
image presents the amount of time that each method took to execute the
forecasting for all horizons. The second image presents the average time for
each forecasting step, also in horizons.
It was
also observed in Figure 11 that LSTM underperforms statistical methods when
using small training data sets. The same figure shows that the LSTM outperforms
the other selected methods only when the training data set contains at least
500 sensor readings.
5 CONCLUSIONS
In this work, we present different
forecasting techniques used to build a real-world Industry 4.0 application
using concepts of Digital Twins. This experiment used real data collected from
a temperature sensor during the initial stages of a manufacturing process were
used.
The provided results
contain information to conclude that LSTM obtained a better outcome for the
RMSE when using large training data sets. LSTM got similar or lower results
when working with a small training data set. This means that LSTM must be carefully
selected depending on the amount of data available to train the model.
Moreover, Figure 9 and 10 shows LSTM taking more processing time than the other
selected methods in the forecasting phase. It also adds an extra step in the
process: which is the hyperparameters search before fitting the model.
It is also clear that,
despite the discussed drawbacks of using LSTM models, its accuracy gains can
have a significant positive impact, especially in the context of Digital Twins
and industrial applications [29]. The following points can be
observed:
·
Accuracy
Gains:
LSTM models are known for capturing sequential patterns and dependencies in
data, making them valuable for time series forecasting and predictive modeling.
Given that it resulted in improved accuracy, it can lead to more reliable
predictions and decision-making. According to
the results presented in
this work, LSTM outperformed Auto ARIMA by an average of 4.83%, which be enough
to avoid equipment faults and reduced maintenance tasks.
·
Reduced
Resource Usage: By achieving more accurate predictions, the usage of industrial, such
as natural gas and electricity, can be optimized. This means that utility resources
can be used more efficiently, potentially reducing costs, minimizing waste, and
reducing the environmental impact.
·
Financial
Impact:
Even small gains in RMSE can translate to significant cost savings in an
industrial environment. This is particularly crucial in industries where energy
consumption, resource utilization, and operational efficiency are closely
monitored and directly impact on the bottom line.
In summary, despite the potential drawbacks of using
LSTM models, their ability to enhance accuracy and, consequently, reduce
resource consumption and costs can make them a valuable tool in the context of
Digital Twins and industrial operations. However, it's important to continue
refining and fine-tuning these models to mitigate their limitations and
maximize their benefits.
The following
topics can be used for future work around the subject of this paper.
·
How to
identify the most optimal length of the training data set without having to
test different lengths?
·
Execute
comparisons using different multi-step ahead forecast strategies, such as recursive,
direct and hybrid.
·
Execute
forecasting using multivariate timeseries by using information from other
digital twin’s sensor data and its geolocations. With the objective to predict
failures and reduce utility consumption.
REFERENCES
[1] GRIEVES,
Michael; VICKERS, John. Origins of the digital twin concept. Florida
Institute of Technology, v. 8, p. 3-20, 2016.
[2] ATTARAN, Mohsen; CELIK,
Bilge Gokhan. Digital Twin: Benefits, use cases, challenges, and
opportunities. Decision Analytics Journal, p. 100165, 2023.
[3] OLCOTT, S.; MULLEN, C.
Digital twin consortium defines digital twin. Available at: blog.digitaltwinconsortium.org/2020/12/
digital-twin-consortium-defines-digital-twin.html, 2020.
[4] BLÁZQUEZ-GARCÍA, Ane et al. A review on outlier/anomaly detection in
time series data. ACM Computing Surveys (CSUR), v. 54, n. 3, p.
1-33, 2021.
[5] KHAYATI,
Mourad et al. Mind the gap: an experimental evaluation of imputation of missing
values techniques in time series. In: Proceedings of the VLDB Endowment.
2020. p. 768-782.
[6] LIMA, Felipe Tomazelli; SOUZA, Vinicius
MA. A Large Comparison of Normalization Methods on Time Series. Big
Data Research, v. 34, p. 100407, 2023.
[7] LEYS, Christophe et al.
Detecting outliers: Do not use standard deviation around the mean, use absolute
deviation around the median. Journal of experimental social psychology,
v. 49, n. 4, p. 764-766, 2013.
[8] TROYANSKAYA, Olga et al.
Missing value estimation methods for DNA microarrays. Bioinformatics,
v. 17, n. 6, p. 520-525, 2001.
[9] MUSHTAQ,
Rizwan. Augmented dickey fuller test. 2011.
[10] FULLER, Wayne A. Introduction
to statistical time series. John Wiley & Sons, 2009.
[11] VAFAEIPOUR,
Majid et al. Application of sliding window technique for prediction of wind
velocity time series. International Journal of Energy and Environmental
Engineering, v. 5, p. 1-7, 2014.
[12] BERGMEIR, Christoph; BENÍTEZ, José M. On
the use of cross-validation for time series predictor evaluation. Information
Sciences, v. 191, p. 192-213, 2012.
[13] BOX, G.E.P.; JENKINS, G. M.;
REINSEL, G. C. Time series analysis: forecasting and control. John
Wiley & Sons, 2011.
[14] KANAWADAY, A.;
SANE, A. Machine learning for predictive maintenance of industrial machines
using IoT sensor data. In: 2017 8th IEEE international conference on
software engineering and service science (ICSESS). IEEE, 2017. p. 87-90.
[15] ZHANG,
Weishan et al. LSTM-based analysis of industrial IoT equipment. IEEE
Access, v. 6, p. 23551-23560, 2018.
[16] MANI, Geetha;
VOLETY, Rohit. A comparative analysis of LSTM and ARIMA for enhanced real-time
air pollutant levels forecasting using sensor fusion with ground station
data. Cogent Engineering, v. 8, n. 1, p. 1936886, 2021.
[17] ELSARAITI,
Meftah; MERABET, Adel; AL-DURRA, Ahmed. Time Series Analysis and Forecasting of
Wind Speed Data. In: 2019 IEEE Industry Applications Society Annual
Meeting. IEEE, 2019. p. 1-5.
[18] HOCHREITER,
Sepp; SCHMIDHUBER, Jürgen. Long short-term memory. Neural computation,
v. 9, n. 8, p. 1735-1780, 1997.
[19] CHHAJER,
Parshv; SHAH, Manan; KSHIRSAGAR, Ameya. The applications of artificial neural
networks, support vector machines, and long–short term memory for stock market
prediction. Decision Analytics Journal, v. 2, p. 100015, 2022.
[20] TAN, Mao et al.
Ultra-short-term industrial power demand forecasting using LSTM based hybrid
ensemble learning. IEEE transactions on power systems, v. 35, n. 4,
p. 2937-2948, 2019.
[21] ZHANG, Weishan et al. LSTM-based analysis of
industrial IoT equipment. IEEE Access, v. 6, p. 23551-23560, 2018.
[22] COOK, Andrew
A.; MISIRLI, Göksel; FAN, Zhong. Anomaly detection for IoT time-series data: A
survey. IEEE Internet of Things Journal, v. 7, n. 7, p. 6481-6494,
2019.
[23]
AKIBA, Takuya et al. Optuna: A next-generation hyperparameter
optimization framework. In: Proceedings of the 25th ACM SIGKDD
international conference on knowledge discovery & data mining. 2019. p.
2623-2631.
[24]
HYNDMAN, Rob J. Measuring forecast accuracy. Business
forecasting: Practical problems and solutions, p. 177-183, 2014.
[25] HYNDMAN, Rob J.; KOEHLER, Anne B. Another look at
measures of forecast accuracy. International journal of forecasting, v. 22,
n. 4, p. 679-688, 2006.
[26] HUNTER, John
D. Matplotlib: A 2D graphics environment. Computing in science &
engineering, v. 9, n. 03, p. 90-95, 2007.
[27] GARZA,
Federico et al. StatsForecast: Lightning fast forecasting with statistical and
econometric models. PyCon: Salt Lake City, UT, USA, 2022.
[28] FRIEDMAN,
Milton. A comparison of alternative tests of significance for the problem of m
rankings. The annals of mathematical statistics, v. 11, n. 1, p.
86-92, 1940.
[29] CHOI,
Eunjeong; CHO, Soohwan; KIM, Dong Keun. Power demand forecasting using long
short-term memory (LSTM) deep-learning model for monitoring energy sustainability. Sustainability,
v. 12, n. 3, p. 1109, 2020.