
Desenvolvimento de Um Robô Cartesiano Pick-and- Place Com 4 Graus de Liberdade
##plugins.themes.bootstrap3.article.sidebar##
Publicado
Jul 16, 2024
##plugins.themes.bootstrap3.article.main##
Resumo
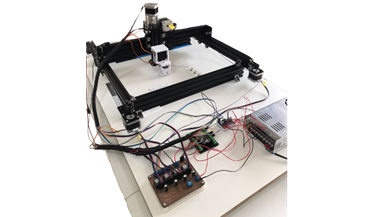
Este artigo apresenta o desenvolvimento de um robô cartesiano pick-and-place com 4 graus de liberdade, destinado a realizar tarefas de movimentação e posicionamento de objetos em ambientes controlados. O projeto é dividido em três fases: mecânica, elétrica e software. Na fase mecânica, o robô é montado fisicamente com a modelagem e impressão da garra. Na fase elétrica, uma placa de circuito é elaborada e os circuitos de potência e controle do manipulador são construídos, além da definição dos motores de passo, servomotores, fontes de alimentação e reguladores de tensão. Na última fase, é desenvolvido o firmware do dispositivo, que é capaz de receber comandos através de um aplicativo para smartphone, permitindo a movimentação nos três eixos cartesianos, rotação e fechamento da garra. Os principais resultados demonstram a viabilidade de construir um manipulador robótico acessível, funcional e capaz de realizar as ações esperadas de um dispositivo pick-and-place.
Downloads
Não há dados estatísticos.
##plugins.themes.bootstrap3.article.details##
Como Citar
Moreira, C., Zanoni, J., Neto, L., Matsuo, M., El Youssef, E., & MORATELLI, C. (2024). Desenvolvimento de Um Robô Cartesiano Pick-and- Place Com 4 Graus de Liberdade. Revista De Engenharia E Pesquisa Aplicada, 9(3), 70-79. https://doi.org/10.25286/repa.v9i3.2803
Seção
Engenharia Elétrica e Eletrônica
